

Navigation & Perception
Overview
Navigation & perception are basic functional components for mobile robots that enable the robot to perform point A to B mobility and perform the assigned task.
Projects under Navigation & Perception
Get in touch with us if you are interested!
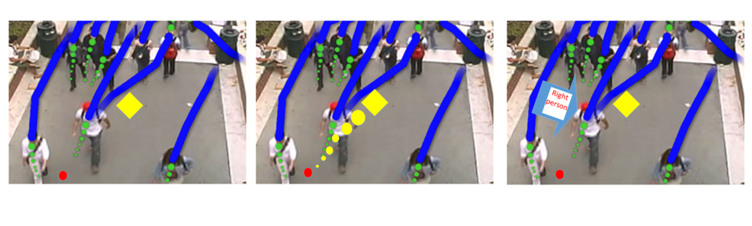
Autonomous Navigation using Advanced Localization & Obstacle Avoidance with Reconfigurable Sensors (ANALOARS)
 ROS-based navigation stack developed for robots to orientate, localise, and interact in an environment filled with people.
ROS-based navigation stack developed for robots to orientate, localise, and interact in an environment filled with people.
Semantic and Map-lite Indoor Visual Navigation (SML)
 Improved navigation in indoor close-quarters and dynamic environments, with semantic labelling of 3D point cloud, reduced reliance on fixed maps, and the ability to navigate in close proximity to people.
Improved navigation in indoor close-quarters and dynamic environments, with semantic labelling of 3D point cloud, reduced reliance on fixed maps, and the ability to navigate in close proximity to people.